

Control Area Network (CAN) bus, is a high-integrity serial bus system originally created as an automotive vehicle bus, which later came to be used as one of the fieldbuses for industrial automation. CANopen® is a CAN-based communication system. It comprises higher-layer protocols and profile specifications and provides a physical and data link layer for serial communication with speeds up to 1 Mbps. CANopen® and DeviceNet™ are higher level protocols standardized on top of CAN bus to allow interoperability with devices on the same industrial network. CANopen® supports 127 nodes on the network while DeviceNet™ supports 64 nodes on the same network.
EPC CANopen® encoders use communication profile CiA 301 and device profile CiA 406 V3.2 class C2.
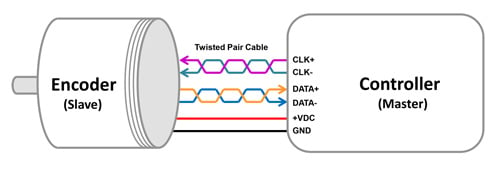
Synchronous Serial Interface, or SSI, is a commonly used point-to-point serial communications protocol. It is widely used in industrial applications due to its simplicity and proven history. SSI is the most straight-forward communication protocol that EPC offers for its absolute encoders. SSI is a master/slave technology; the controller serves as the master device and the encoder acts as the slave device. The master controls the speed of data transfer based on clock frequency; each clock pulse from the master prompts a response of 1 bit of information from the slave device until the entire packet has been received. The graphic below illustrates the master/slave relationship:
 EDS file – for all CANopen® encoders
EDS file – for all CANopen® encoders
See CANopen® Documentation below for additional PDF downloads.
