
.jpg)
What are motor encoders?
MOTOR ENCODERS ARE ROTARY ENCODERS ADAPTED to provide information about an electric motor shaft's speed and/or position. Like rotary encoders in general, motor encoders are most commonly optical and produce signals that are either incremental or absolute. Mechanical packages for motor encoders can be shaft, thru-bore or blind hollow bore, or modular solutions. Shafted motor encoders use a flexible shaft coupling to connect the encoder shaft to the motor shaft. Thru-bore or blind hollow bore housings connect directly to the motor shaft via a shaft collar. The encoder housing can then be mounted directly to the motor housing, or with a flexible tether arm, or a mounting bracket.
How to choose a motor encoder
Several factors affect the choice of a motor encoder for a given application, including (1) the type of motor involved, (2) the mounting configuration required, and (3) the type of information required by the control system.
1. Incremental or absolute?
Motor encoders, like all rotary encoders, indicate shaft movement in one of two ways: incremental or absolute. Choosing one of these options is typically the first step toward choosing the right motor encoder.
Incremental feedback
Incremental motor encoders are generally used to provide information about a motor shaft’s speed and direction by means of two clock channels, labelled A and B. The pulse rate indicates speed while the leading or lagging of channels A or B indicates direction. In the case of servo motors, an incremental encoder can also provide commutation channels, commonly known as U, V, and W channels. The resolution of these U, V, and W channels directly correlates to the number of magnetic poles on the motor. The commutation channels are used to properly align the windings and the magnets of the rotor and the stator and are how the control system knows when to energize certain windings to achieve optimal power and torque.
Absolute feedback
Absolute motor encoders indicate the shaft’s angular position as well as the direction and speed of its movement. In the case of servo motors, the use of an absolute encoder eliminates the need for the U, V, and W channels. The same absolute data used for position, direction, and speed is also used for proper commutation alignment. The two basic types of absolute motor encoders are single-turn and multi-turn.
Single-turn encoders only allow for control systems to know the angular position of the motor shaft within a single revolution. The motor shaft can of course rotate more than a single revolution, but the number of complete shaft rotations is unknown when using a single-turn encoder.
Multi-turn encoders provide data that includes the number of complete shaft revolutions. This allows the control system to know how many complete revolutions the motor shaft has turned and the angular position of the shaft within its current revolution.
When speed control is an encoder’s only function, absolute feedback may be an unnecessary expense due to the higher cost of the encoder and requisite control system. In the case of speed control, incremental feedback meets the needs of the application and is the most cost-effective solution.
When the motor shaft’s actual position at any given time is important to the application, absolute encoders are crucial. For applications that require retained position information over multiple rotations due to functional requirements or after power loss, a multi-turn absolute encoder is needed.
2. What type of motor?
Each type of electric motor places its own set of demands on the accompanying motor encoder. In most cases, this reflects each motor’s typical range of uses.
AC Motor Encoders
AC induction motors are cost-effective, sturdy, and durable. These qualities make them especially common in a wide range of automated machine control systems. Motor encoders give AC motors a greater degree of speed control than they otherwise would have. Because AC motors are used so widely, most applications put a premium on shock and vibration resistance. Encoders with industrial connector options like a conduit box, latching, or mil-spec are often preferred.
DC Motor Encoders
The exact speed of DC motors can be especially difficult to control without closed-loop feedback. Isolated from the rest of a system, a wound-wire shaft rotating within a stator’s magnetic field can be measured with some precision; in real-world applications, motor encoders are often the only way to inform the system about a DC motor’s exact speed.
Servo Motor Encoders
Permanent magnet motors, or servo motors, tend to be used in situations where precision is more important than power. Servo motor encoders follow suit and are often designed as high-resolution absolute encoders for use in closed-loop systems. Incremental encoder feedback, when coupled with the appropriate control system, can be a lower-cost feedback alternative for servo motors.
Stepper Motor Encoders
Stepper motors provide position information by virtue of their design, making them popular, cost-effective components in open-loop systems. This feature also prevents them from offering precise speed control, especially when loads change frequently and suddenly. Stepper motor encoders provide closed-loop feedback for more precise control and are often incremental to enhance the position control inherent in stepper motor design. Many stepper motors are compact in size and are suitable for modular encoders that do not use bearings.
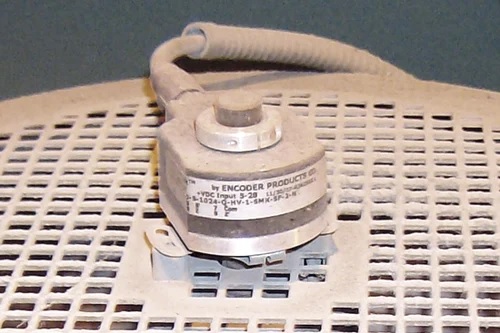
A Model 260 thru-bore encoder with a dust-tight IP64 seal
3. Mounting options for motor encoders
How an encoder will mount to the motor is the final major consideration when selecting a motor encoder. The most common designs are as follows.
Shafted Motor Encoders
Traditionally, motor feedback is achieved with a shafted encoder coupled directly to the motor’s shaft. This gives shafted motor encoders a degree of electrical and mechanical isolation that other designs do not. Coupling a shafted encoder to a motor requires a long enough motor shaft for secure mounting, however. A poorly joined coupling can negatively impact a motor’s performance by altering the shaft’s angle. In many designs, a bell housing or standoff is used between the motor and encoder. These considerations typically add cost to shafted motor encoders.

Flexible shaft couplings for securely joining shafts
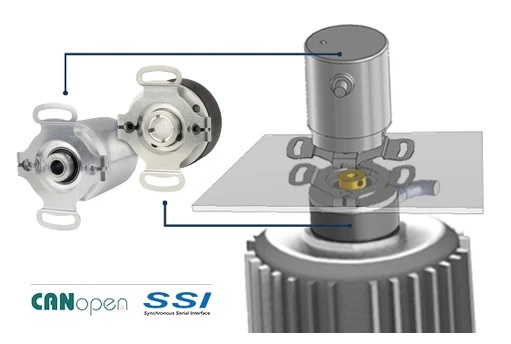
Thru-Bore, Blind Hollow Bore/Hollow Shaft, and Hub Motor Encoders
Thru-bore and blind hollow bore/hollow shaft encoders are easier to install than shafted packages: they mount directly to the motor shaft via a pass-through shaft collar and usually use a flexible steel tether arm to attach to the motor housing. Some thru-bore housings attach via motor-compatible housing, such as a C-face design. This approach does not require a separate coupling or subsequent shaft alignment. Thru-bore motor encoders do not inherently provide electrical isolation unless equipped with non-conducting bore inserts and mounting bushings. Most thru-bore and blind hollow bore/hollow shaft motor encoders usually have lighter duty bearings and housing structure and are typically lower cost than shafted models as a result.